# EOAT rėmo jungiamosios detalės: Pneumatinio gripperio ir robotų rankos integravimas automatizuotuose dirbtuvėse
Industry 4.0 eros metu automatizuoti cechai patiria transformacinį poslinkį link didesnio efektyvumo, tikslumo ir lankstumo. Šioje evoliucijoje svarbiausia beveik tobula galinės įrangos (EOAT) sistemų integracija, kur rėmo jungiamosios detalės atlieka svarbų vaidmenį, jungiant robotų rankas su kritinėmis komponentėmis, tokiomis kaip pneumatiniai gripperiai. Šiame straipsnyje aptariama, kaip EOAT rėmo jungiamosios detalės optimizuoja automatizacijos darbo procesus, padidina operacines galimybes ir skatina produktyvumą moderniose gamybos aplinkose.
## EOAT rėmo jungiamųjų detalių vaidmuo automatikoje
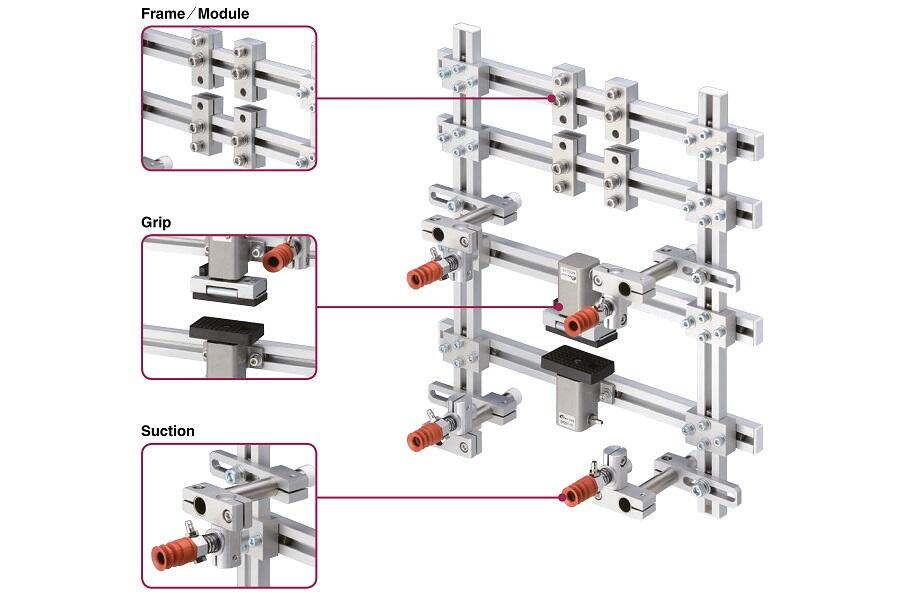
EOAT rėmo jungiamosios detalės veikia kaip mechaninis sąsajas tarp robotų rankų ir paskutinių efektorių, tokių kaip pneumatiniai griebtuvai, vakuumo taurės arba nestandartinė įrankių įranga. Šios jungiamosios detalės sukurtos taip, kad užtikrintų patikimą, modulinę ir prisitaikančią jungtį, atlaikančią greito ciklo gamybos sąlygas, kartu užtikrindamos tikslų išlyginimą ir kartojamumą.

Automatizuotuose dirbtuvėse, kur darbai apima nuo medžiagos valdymo iki sudėtingų surinkimo procesų, EOAT rėmo jungiamosios detalės sprendžia tris pagrindines problemas:
- **Suderinamumas**: Leidžia be pertraukimų integruoti įvairius robotų rankų modelius su efektoriais.
- **Lankstumas**: Leidžia greitai keisti įrankius, kad būtų galima prisitaikyti prie besikeičiančių gamybos reikalavimų.
- **Ilgaamžiškumas**: Atlaiko mechaninę įtampą, vibraciją ir aplinkos veiksnius, tokius kaip dulkės ar aušinimo skystis.

## Sinergija su pneumatiniais griebtuvais: tikslumas medžiagos valdyme
Pneumatiniai griebtuvai automatikoje yra labai populiarūs dėl jų greičio, jėgos kontrolės ir tinkamumo valdyti įvairias medžiagas – nuo delikčių elektronikos iki sunkių metalo dalių. Kartu naudojant EOAT rėmo jungiamuosius elementus, jų našumas padidėja dėl šių priežasčių:
1. **Padidinta prisitaikymo galimybė**: Rėmo jungiamieji elementai leidžia pneumatiniais griebtuvais per kelias minutes pakeisti poziciją arba pakeisti juos, kad robotų rankos galėtų perjungti tarp užduočių, tokių kaip kėlimas, dedimas ar rūšiavimas, be prastovų.
2. **Optimizuota jėgos sklaida**: Standžios, bet lengvos konstrukcijos jungiamieji elementai užtikrina vienodą jėgos perdavimą nuo griebtuvo iki darbo objekto, sumažindami pažeidimo riziką trapiai prekei ir išlaikant patikimą sukibimą sunkiems kroviniams.
3. **Besiūlis pneumatinis integravimas**: Daugelyje EOAT jungiamųjų detalių yra integruotos oro kanalų sistemos, kurios pašalina būtinybę naudoti išorinius žarnas. Tai supaprastina konstrukciją, mažina netvarką ir sumažina žarnų susivėrimo riziką vykdant greitus judesius.
Automobilių surinkimo linijose, pavyzdžiui, tokia integracija leidžia robotų rankoms, kurios aprūpintos pneumatiniais griovikliais, pereiti nuo korpuso plokščių prie mažų tvirtinimo detalių, kai EOAT jungiamieji užtikrina tikslų lygiavimą kiekvienoje stotyje.
## Integracija su automatinėmis robotų rankomis: operacinių procesų efektyvumo didinimas
Automatinės robotų rankos yra modernių dirbtuvių pagrindinis darbo įrenginys, tačiau jų naudingumas priklauso nuo įrankių, kuriuos jos naudoja. EOAT rėmo jungtys atveria jų visas galimybes:
- **Standartizuojant sąsajas**: nepriklausomai nuo robotų rankos prekės žymės ar modelio (pvz., šarnyrinės, SCARA arba bendradarbiaujančios robotų rankos), rėmo jungtys suteikia universalią montavimo sistemą, supaprastina įrankių integravimą ir sumažina technikų mokymo reikalavimus.
- **Palaikant modulinį įrankį**: Jungikliai leidžia prijungti daugiafunkcius EOAT komplektus – derinant pneumatinus griebtuvus su jutikliais, kameromis arba sukiojančiomis jėgomis – leidžiant robotų rankoms atlikti sudėtingas užduotis, tokias kaip kokybės patikra per montavimą.
- **Pagerinant pakartojamumą**: Aukštos tikslumo rėmo jungiklių apdirbimas užtikrina nuoseklų įrankių pozicionavimą, kuris yra kritiškai svarbus tokiose srityse kaip 3D spausdinimas, kai net menkiausios nesuderinamumai gali pakenkti detalės kokybei.
Elektronikos gamyboje šis sinergijos efektas matomas montuojant elektronines plokštes, kur robotų rankos, sujungtos su EOAT pneumatiniais griebtuvais, deda komponentus su mikronų tikslumu, kurią užtikrina jungiklio stabilus sąsaja.
## Praktinės panaudojimo sritys: Automatizuotų darbo procesų transformacija
EOAT rėmo jungiklių, pneumatinų griebtuvų ir robotų rankų integracija keičia pramonės šakas:
- **Logistika ir pakuotė**: Elektroninės prekybos įvykdymo centruose robotų rankos naudoja EOAT prijungiamus vakuumo griebtuvus, kad galėtų valdyti pakuotes įvairaus dydžio. Rėmo jungiamosios detalės leidžia greitai keisti įrankius, perjungiant tarp griebtuvų, skirtų kartoninėms dėžėms ir delikatiems vokams.
- **Maisto ir gėrimų sektorius**: Sanitizuojami EOAT sujungimai kartu su maisto pramonei tinkamais pneumatiniais griebtuvais užtikrina higienišką produktų valdymą – nuo vaisių rūšiavimo iki supakuotų prekių dedimo ant konvejerinių juostų, užtikrinant griežtus saugos standartus.
- **Aviacijos gamyba**: Aukštos stiprybės aliuminio arba titano EOAT jungiamosios detalės tvirtai prijungia pneumatinus griebtuvus prie robotų rankų, leidžiant tiksliai manipuliuoti su lengvais, tačiau konstrukciškai svarbiais komponentais, tokiais kaip sparnų skydeliai.
## EOAT rėmo jungiamųjų detalių integravimo privalumai
EOAT rėmo jungiamųjų detalių, pneumatinų griebtuvų ir robotų rankų derinys suteikia matomų privalumų:
- **Padidinta našumas**: Sumažintos perjungimo laikas ir 24\/7 veikimo galimybės sumažina gamybos ciklus iki 30% didelės apimties gamyboje.
- **Kainos taupymas**: Modulinė įrankių sistema sumažina specialių robotų rankų poreikį, o padidinta tikslumas mažina medžiagų atliekas.
- **Darbuotojų saugumas**: Automatizuojant kartotinus ar pavojingus darbus (pvz., kelti sunkius daiktus) sumažėja darbo vietos sužalojimai, o bendradarbiaujantys robotai, turintys EOAT sistemas, saugiai dirba šalia žmonių operatorių.
- **Gamybos mastelio keitimas**: Kai gamybos poreikiai kinta, dirbtuvės gali atnaujinti arba pakeisti EOAT komponentus be visos robotų sistemos keitimo, užtikrindamos investicijų aktualumą ilgalaikėje perspektyvoje.
## Ateities tendencijos: naujovės EOAT technologijose
Kai automatizacija tobulėja, EOAT jungiamųjų detalių konstrukcija prisitaiko prie naujų reikalavimų:
- **Išmanieji jungikliai**: Jungiamuosiuose elementuose integruoti jutikliai stebės įrankių nublizgimą, temperatūrą ir gniaužymo jėgą, leisdamiesi prognozuoti priežiūrą ir realaus laiko koregavimą per IoT integravimą.
- **Pridėtinė gamyba**: 3D spausdinti jungiamieji elementai, sukurti konkrečiai naudoti, suteiks mažesnį svorį ir sudėtingas geometrijas, dar labiau optimizuojant našumą.
- **Atsakingumas**: Aplinkai draugiški medžiagos ir energiją taupančios konstrukcijos pritaikys EOAT sistemas prie globalių pastangų sumažinti gamybos anglies pėdsaką.
## Išvada
EOAT rėmo jungiamieji elementai yra automatuotų dirbtuvių nenuvertinti herojai, leidžiantys be problemų integruoti pneumatinės griebtuvės ir robotų rankos. Užtikrindami suderinamumą, lankstumą ir tikslumą, jie suteikia gamintojams galimybę prisitaikyti prie kintančių reikalavimų, didinti našumą ir išlaikyti konkurencinį pranašumą globalioje rinkoje. Vystantis technologijoms, šie jungiamieji elementai toliau krus svarbų vaidmenį formuojant pramonės automatizavimo ateitį – ten, kur susitinka efektyvumas, universalumas ir inovacijos.