# EOAT Frame Connectors: การผสานการทำงานของอุปกรณ์ยึดแบบลมและแขนกลในโรงงานอัตโนมัติ
ในยุคของอุตสาหกรรม 4.0 โรงงานอัตโนมัติกำลังเปลี่ยนผ่านไปสู่ประสิทธิภาพ ความแม่นยำ และความยืดหยุ่นที่สูงขึ้น หัวใจสำคัญของวิวัฒนาการนี้อยู่ที่การผสานระบบอุปกรณ์ปลายแขน (EOAT) อย่างไร้รอยต่อ โดยตัวเชื่อมโครงสร้างมีบทบาทสำคัญในการเชื่อมต่อแขนกลกับองค์ประกอบสำคัญ เช่น เครื่องมือกลคีมแบบลม บทความนี้จะสำรวจแนวทางที่ตัวเชื่อมโครงสร้าง EOAT ช่วยเพิ่มประสิทธิภาพกระบวนการทำงานอัตโนมัติ เพิ่มความหลากหลายในการดำเนินงาน และขับเคลื่อนผลิตภาพในสภาพแวดล้อมการผลิตยุคใหม่
## บทบาทของตัวเชื่อมต่อเฟรม EOAT ในการทำงานอัตโนมัติ
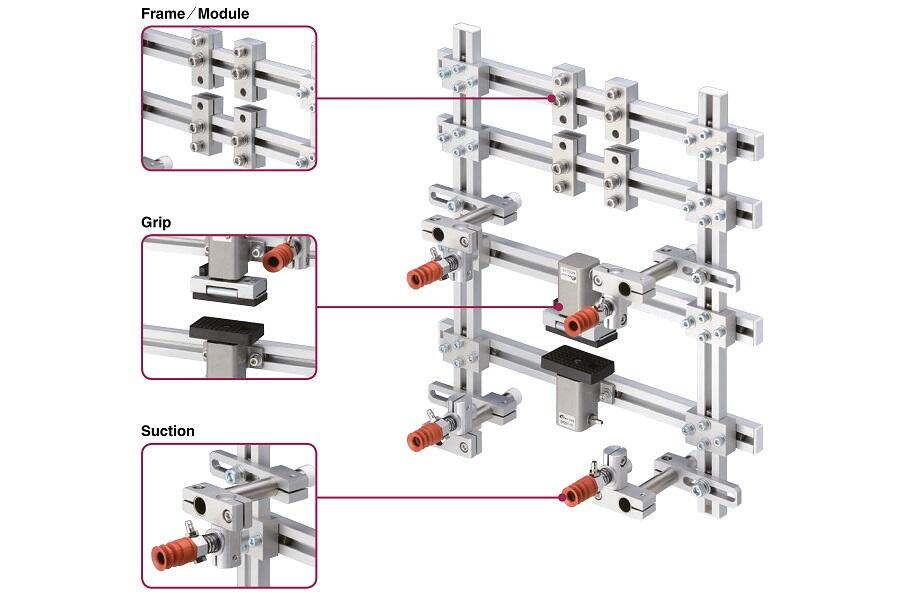
ตัวเชื่อมต่อเฟรม EOAT ทำหน้าที่เป็นอินเตอร์เฟซเชิงกลระหว่างแขนหุ่นยนต์กับอุปกรณ์ปลายทาง (End-effectors) เช่น แคลมป์ลม (Pneumatic Grippers), ถ้วยดูดสุญญากาศ (Vacuum Cups) หรือเครื่องมือพิเศษที่ออกแบบมาเฉพาะ ตัวเชื่อมต่อเหล่านี้ได้รับการออกแบบมาเพื่อให้การเชื่อมต่อที่แข็งแรง มีความแบบพิเศษ และปรับใช้ได้หลากหลาย ทนทานต่อสภาพการทำงานที่เข้มงวดอย่างต่อเนื่องในกระบวนการผลิตความเร็วสูง พร้อมทั้งรับประกันความแม่นยำในการจัดแนวและการทำงานซ้ำได้อย่างสม่ำเสมอ

ในโรงงานอัตโนมัติที่งานมีตั้งแต่การจัดการวัสดุไปจนถึงการประกอบชิ้นส่วนที่ซับซ้อน ตัวเชื่อมต่อเฟรม EOAT แก้ปัญหาหลัก 3 ประการ ได้แก่
- **ความเข้ากันได้**: ช่วยให้การเชื่อมต่อระหว่างแขนหุ่นยนต์รุ่นต่างๆ กับอุปกรณ์ปลายทางเป็นไปอย่างราบรื่น
- **ความยืดหยุ่น**: ช่วยให้เปลี่ยนเครื่องมือได้อย่างรวดเร็วเพื่อรองรับข้อกำหนดในการผลิตที่แตกต่างกัน
- **ความทนทาน**: สามารถรับแรงกระแทก การสั่นสะเทือน และปัจจัยแวดล้อมต่างๆ เช่น ฝุ่นหรือสารหล่อเย็นได้ดี

## ความร่วมมือกับแคลมป์ลม: ความแม่นยำในการจัดการวัสดุ
แคลมป์ลมได้รับความนิยมอย่างแพร่หลายในระบบอัตโนมัติ เนื่องจากความเร็ว การควบคุมแรง และความเหมาะสมในการจัดการวัสดุที่หลากหลาย ตั้งแต่ชิ้นส่วนอิเล็กทรอนิกส์ที่ละเอียดอ่อนไปจนถึงชิ้นส่วนโลหะหนัก เมื่อใช้งานร่วมกับตัวเชื่อมต่อเฟรม EOAT ประสิทธิภาพจะเพิ่มขึ้นผ่าน:
1. **ความสามารถในการปรับตัวได้ดีขึ้น**: ตัวเชื่อมต่อเฟรมทำให้แคลมป์ลมสามารถปรับตำแหน่งหรือเปลี่ยนชุดใหม่ได้ภายในไม่กี่นาที ช่วยให้แขนหุ่นยนต์เปลี่ยนไปทำงานอื่นๆ เช่น การหยิบ การวาง หรือการคัดแยก โดยไม่ต้องหยุดทำงาน
2. **การกระจายแรงได้อย่างเหมาะสม**: ดีไซน์ของตัวเชื่อมต่อที่แข็งแรงแต่มีน้ำหนักเบา ช่วยให้แรงถูกส่งผ่านจากแคลมป์ไปยังชิ้นงานอย่างสม่ำเสมอ ลดความเสี่ยงในการเกิดความเสียหายกับชิ้นงานที่เปราะบาง ขณะเดียวกันยังคงประสิทธิภาพในการจับของที่มีน้ำหนักมาก
3. **การเชื่อมต่อระบบลมแบบไร้รอยต่อ**: ตัวเชื่อมต่อ EOAT จำนวนมากออกแบบช่องทางลมไว้ภายในตัวเอง ทำให้ไม่ต้องใช้ท่อลมภายนอก ส่งผลให้โครงสร้างโดยรวมเรียบง่ายขึ้น ลดความยุ่งเหยิง และลดโอกาสที่ท่อลมจะพันกันขณะเคลื่อนที่ด้วยความเร็วสูง
ตัวอย่างเช่น ในสายการประกอบยานยนต์ การผนวกรวมนี้ช่วยให้แขนหุ่นยนต์ที่ติดตั้งเครื่องมือแบบปั๊มลมสามารถจัดการชิ้นส่วนตัวถังและชิ้นส่วนยึดขนาดเล็กได้อย่างสลับเปลี่ยนกัน โดยมีตัวเชื่อม EOAT เป็นตัวควบคุมให้การจัดแนวแต่ละสถานีมีความแม่นยำสูง
## การผนวกรวมกับแขนหุ่นยนต์แบบอัตโนมัติ: ขับเคลื่อนประสิทธิภาพในการดำเนินงาน
แขนหุ่นยนต์แบบอัตโนมัติคือกำลังหลักของโรงงานยุคใหม่ แต่ประสิทธิภาพของพวกมันขึ้นอยู่กับเครื่องมือที่ใช้งาน ตัวเชื่อมแบบเฟรม EOAT ช่วยปลดล็อกศักยภาพสูงสุดของแขนหุ่นยนต์โดย:
- **มาตรฐานอินเตอร์เฟซ**: ไม่ว่าจะเป็นแบรนด์หรือรุ่นของแขนหุ่นยนต์ใด (เช่น แขนแบบ articulated, SCARA หรือหุ่นยนต์ทำงานร่วมกับคน) ตัวเชื่อมแบบเฟรมจะช่วยสร้างระบบติดตั้งแบบสากล ทำให้การผนวกรวมเครื่องมือง่ายขึ้น และลดความจำเป็นในการฝึกอบรมช่างเทคนิค
- **รองรับการใช้งาน Modular Tooling**: ตัวเชื่อมต่อช่วยให้สามารถติดตั้งชุด EOAT แบบหลายฟังก์ชัน—รวมตัวจับลมเข้ากับเซ็นเซอร์ กล้อง หรือเครื่องมือวัดแรงบิด—ทำให้แขนหุ่นยนต์สามารถทำงานที่ซับซ้อน เช่น การตรวจสอบคุณภาพระหว่างการประกอบชิ้นงาน
- **เพิ่มความแม่นยำในการทำซ้ำ**: การกลึงชิ้นส่วนตัวเชื่อมต่อแบบความละเอียดสูง ช่วยให้ตำแหน่งเครื่องมือคงที่และแม่นยำ ซึ่งมีความสำคัญอย่างยิ่งในงานเช่น การพิมพ์แบบ 3 มิติ ที่แม้แต่การจัดแนวที่ผิดเพี้ยนเล็กน้อยก็อาจส่งผลต่อคุณภาพของชิ้นส่วนได้
ในอุตสาหกรรมการผลิตอุปกรณ์อิเล็กทรอนิกส์ ความร่วมมือนี้เห็นได้ชัดเจนในกระบวนการประกอบแผงวงจร ซึ่งแขนหุ่นยนต์ที่ติดตั้งตัวจับลมแบบ EOAT สามารถวางชิ้นส่วนด้วยความแม่นยำระดับไมครอน โดยได้รับการสนับสนุนจากอินเตอร์เฟซที่เสถียรของตัวเชื่อมต่อ
## การประยุกต์ใช้งานจริง: การเปลี่ยนแปลงกระบวนการทำงานอัตโนมัติ
การผสานรวมตัวเชื่อมต่อโครงสร้าง EOAT ตัวจับลม และแขนหุ่นยนต์กำลังเปลี่ยนโฉมอุตสาหกรรมต่างๆ:
- **ลอจิสติกส์และบรรจุภัณฑ์**: ในศูนย์ปฏิบัติตามคำสั่งซื้อแบบอีคอมเมิร์ซ แขนหุ่นยนต์ใช้ตัวจับแบบสุญญากาศที่เชื่อมต่อกับ EOAT เพื่อจัดการกับพัสดุที่มีขนาดแตกต่างกัน ตัวเชื่อมต่อแบบเฟรมช่วยให้เปลี่ยนเครื่องมือได้อย่างรวดเร็ว ช่วยให้สามารถสลับระหว่างตัวจับสำหรับกล่องกระดาษลูกฟูกและซองจดหมายที่เปราะบางได้
- **อาหารและเครื่องดื่ม**: ตัวเชื่อมต่อ EOAT ที่สามารถทำความสะอาดได้ จับคู่กับตัวจับลมที่ปลอดภัยสำหรับอาหาร ช่วยให้จัดการผลิตภัณฑ์ได้อย่างถูกสุขลักษณะ ตั้งแต่การคัดแยกผลไม้ไปจนถึงการวางสินค้าบรรจุภัณฑ์บนสายพานลำเลียง ซึ่งเป็นไปตามมาตรฐานความปลอดภัยที่เข้มงวด
- **การผลิตอากาศยาน**: ตัวเชื่อมต่อ EOAT ที่ทำจากอลูมิเนียมหรือไทเทเนียมที่มีความแข็งแรงสูง ช่วยยึดตัวจับลมเข้ากับแขนหุ่นยนต์ ทำให้สามารถควบคุมชิ้นส่วนที่มีน้ำหนักเบาแต่มีความสำคัญทางโครงสร้าง เช่น แผงปีกเครื่องบิน ได้อย่างแม่นยำ
## ข้อดีของการผสานรวมตัวเชื่อมต่อเฟรม EOAT
การใช้ตัวเชื่อมต่อเฟรม EOAT ตัวจับลม และแขนหุ่นยนต์ร่วมกันนำมาซึ่งประโยชน์ที่สามารถวัดได้:
- **เพิ่มประสิทธิภาพการผลิต**: เวลาในการเปลี่ยนอุปกรณ์ลดลง และสามารถดำเนินการได้ตลอด 24 ชั่วโมง ช่วยลดระยะเวลาการผลิตลงได้ถึง 30% ในสภาพแวดล้อมการผลิตที่มีปริมาณสูง
- **ประหยัดต้นทุน**: การใช้ชุดอุปกรณ์แบบโมดูลาร์ลดความจำเป็นในการใช้แขนหุ่นยนต์เฉพาะทาง ในขณะที่ความแม่นยำที่เพิ่มขึ้นช่วยลดของเสียจากวัสดุ
- **ความปลอดภัยของพนักงาน**: การทำให้ภารกิจที่ซ้ำซากหรือเสี่ยงอันตรายเป็นอัตโนมัติ (เช่น การยกของหนัก) ช่วยลดการบาดเจ็บในที่ทำงาน โดยหุ่นยนต์ทำงานร่วมกับระบบ EOAT สามารถทำงานเคียงข้างผู้ปฏิบัติงานได้อย่างปลอดภัย
- **ความสามารถในการขยายระบบ**: เมื่อความต้องการในการผลิตเปลี่ยนแปลง โรงงานสามารถอัปเกรดหรือปรับตั้งค่าชิ้นส่วน EOAT ใหม่โดยไม่ต้องเปลี่ยนระบบหุ่นยนต์ทั้งหมด ช่วยปกป้องการลงทุนในระยะยาว
## แนวโน้มในอนาคต: นวัตกรรมในเทคโนโลยี EOAT
เมื่อระบบอัตโนมัติพัฒนาไปข้างหน้า ตัวเชื่อมต่อโครงสร้าง EOAT ก็กำลังพัฒนาเพื่อรองรับความต้องการใหม่ๆ ดังนี้
- **ตัวเชื่อมต่ออัจฉริยะ (Smart Connectors)**: เซ็นเซอร์ที่ฝังอยู่ภายในตัวเชื่อมต่อจะคอยตรวจสอบการสึกหรอของเครื่องมือ อุณหภูมิ และแรงจับ เพื่อให้สามารถบำรุงรักษาแบบคาดการณ์ล่วงหน้าและปรับค่าแบบเรียลไทม์ผ่านการบูรณาการระบบ IoT
- **การผลิตแบบเติมวัสดุ (Additive Manufacturing)**: ตัวเชื่อมต่อแบบพิมพ์สามมิติ (3D-printed connectors) ที่ออกแบบมาเฉพาะสำหรับการใช้งานต่าง ๆ จะมีน้ำหนักเบาและรูปทรงเรขาคณิตที่ซับซ้อนมากยิ่งขึ้น ช่วยเพิ่มประสิทธิภาพการใช้งาน
- **ความยั่งยืน (Sustainability)**: วัสดุที่เป็นมิตรกับสิ่งแวดล้อม และการออกแบบที่ประหยัดพลังงาน จะช่วยให้ระบบ EOAT สอดคล้องกับความพยายามระดับโลกในการลดผลกระทบด้านสิ่งแวดล้อมจากการผลิต
## สรุป
ตัวเชื่อมต่อโครงสร้าง EOAT คือฮีโร่ผู้อยู่เบื้องหลังในโรงงานอัตโนมัติ ที่ทำให้สามารถติดตั้งหุ่นยนต์แบบเกร็ปป์ลม (pneumatic grippers) และแขนกล (robotic arms) ได้อย่างไร้รอยต่อ การออกแบบที่เข้ากันได้ มีความยืดหยุ่นและแม่นยำ ช่วยให้ผู้ผลิตสามารถปรับตัวต่อความต้องการที่เปลี่ยนแปลง เพิ่มประสิทธิภาพการผลิต และรักษาความได้เปรียบในการแข่งขันในตลาดโลก ด้วยความก้าวหน้าทางเทคโนโลยี ตัวเชื่อมต่อเหล่านี้จะยังคงมีบทบาทสำคัญในการกำหนดอนาคตแห่งการผลิตอัตโนมัติ—ที่ซึ่งประสิทธิภาพ ความสามารถในการใช้งานหลากหลาย และนวัตกรรมบรรจบกัน