# EOAT ჩარჩო კავშირები: პნევმატიკური გრიპერების და რობოტიზებული მუშა ხელების ინტეგრირება ავტომატიზებულ სამუშაო დარბაზებში
Industry 4.0-ის ეპოქაში ავტომატური სამუშაო წრეები გადატრიალებულია უფრო მაღალი ეფექტურობის, სიზუსტის და მოქნილობისკენ. ამ ევოლუციის სიმაგრეში მდებარეობს End-of-Arm Tooling (EOAT) სისტემების უხეში ინტეგრაცია, სადაც ჩარჩო კონექტორები ასრულებენ გადამწყვეტ როლს რობოტის მუხლების და პნევმატიკური გრიპერების მსგავსი კრიტიკული კომპონენტების დაკავშირებაში. ეს სტატია განიხილავს იმას, თუ როგორ უზრუნველყოფს EOAT ჩარჩო კონექტორები ავტომატიზაციის სამუშაო პროცესების ოპტიმიზაციას, სამუშაო მრავალფეროვნების გაუმჯობესებას და ამაღლებს სამრეწველო გარემოში პროდუქტიულობას.
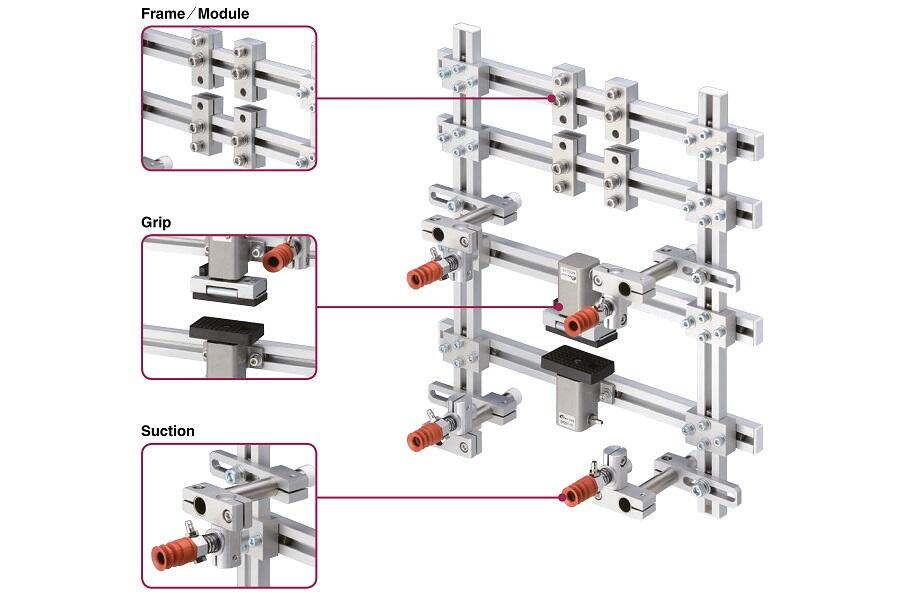
## EOAT ჩარჩო კავშირების როლი ავტომატიზაციაში
EOAT ჩარჩო კავშირები არის მექანიკური ინტერფეისი რობოტის მუშტებსა და ბოლო ეფექტორებს შორის, მაგალითად, პნევმატიკურ გრიპერებს, ვაკუუმურ ბოჭკებს ან სპეციალურ ინსტრუმენტებს. ეს კავშირები შექმნილია იმ მაგიდრების მიწოდების მიზნით, რომლებიც გამძლეა, მოდულურია და შესაძლოა გამძლეობით გამძლეობით გადატანს სწრაფი საწარმო ციკლების დატვირთვას, ასევე უზრუნველყოფს ზუსტ გასწორებას და განმეორებას.

Ავტომატურ სამუშაო დარბაზებში, სადაც ამოცანები მასალების მართვიდან დაწყებული რთული ასამბლებით მთავრდება, EOAT ჩარჩო კავშირები ამოხსნის სამ ძირითად გამოწვევას:
- **თავსებადობა**: სხვადასხვა რობოტის მუშტის მოდელებისა და ბოლო ეფექტორების შორის უსწრაფეს ინტეგრაციის უზრუნველყოფა.
- **მოქნილობა**: სწრაფი ხელსაწყოების შეცვლის საშუალება სხვადასხვა წარმოების მოთხოვნების შესასრულებლად.
- **გამძლეობა**: მექანიკური დატვირთვის, ვიბრაციის, გარემოს ზემოქმედების, მაგალითად, მტვრის ან გასაგრილებელი სითხის გამძლეობა.

## პნევმატიკურ გრიპერებთან სინერგია: ზუსტობა მასალების მართვაში
Პნევმატიკური გრიპერები ავტომატიზაციაში ფართოდ გამოიყენება მათი სიჩქარის, ძალის კონტროლისა და სხვადასხვა მასალების მართვის შესაძლებლობის გამო - დელიკატური ელექტრონიკიდან დაწყებული მძიმე მეტალის კომპონენტებამდე. EOAT საყრდენი კავშირებთან შესაფერისი გრიპერების შესაბამისობით მათი წარმადობა გაიზარდა შემდეგი მიზნებით:
1. **გაუმჯობესებული გამოყენებადობა**: საყრდენი კავშირები საშუალებას აძლევს პნევმატიკური გრიპერების მიმაგრებას ან შეცვლას რამდენიმე წუთში, რაც საშუალებას აძლევს რობოტის მუშა ხელებს გადაერთოს სხვადასხვა ამოცანებზე, როგორიცაა აღება, დადება ან დასახელება შეჩერების გარეშე.
2. **ოპტიმიზებული ძალის განაწილება**: მაგრამ მსუბუქი დამაგრების დიზაინი უზრუნველყოფს გრიპერიდან სამუშაო ნაწილზე ძალის თანაბარ გადაცემას, რაც ამცირებს სახიფათო ნივთების დაზიანების ალბათობას და უზრუნველყოფს მყარ დაჭერას მძიმე ტვირთებისთვის.
3. **უხეში პნევმატიკური ინტეგრაცია**: EOAT კავშირების უმეტესობას აქვს ინტეგრირებული ჰაერის სადენ სადგურები, რაც ამოწურავს გარე შლანგების საჭიროებას. ეს ამარტივებს დიზაინს, აადვილებს მას და ამცირებს შლანგების გამართვის ალბათობას მაღალი სიჩქარით მოძრაობის დროს.
Მაგალითად, ავტომობილების მონტაჟის ხაზებზე ეს ინტეგრაცია სხეულის პანელებისა და პატარა მამონტაჟე ნაწილების საჭიროებისამებრ შეცვლით მომსახურებას უზრუნველყოფს პნევმატიკური გრიპერებით აღჭურვილი რობოტის მუშტებისთვის, რომლებიც თითოეულ სადგურზე ზუსტი გასწორების უზრუნველყოფას უზრუნველყოფს EOAT კონექტორებით.
## ავტომატური რობოტული მუშტების ინტეგრირება: ექსპლუატაციური ეფექტურობის გაზრდა
Ავტომატური რობოტული მუშტები თანამედროვე მასტერკეთების სამუშაო ცხენებია, მაგრამ მათი ეფექტურობა იმ ხელსაწყოებზეა დამოკიდებული, რომლებიც იყენებენ. EOAT საყრდენი კონექტორები ამ პოტენციალის სრულიად გამოყენებას უზრუნველყოფს შემდეგი საშუალებებით:
- **ინტერფეისების სტანდარტიზება**: როგორი მარკის ან მოდელის რობოტული მუშტის გამოყენება არ უნდა იყოს (მაგალითად, ხაზოვანი, SCARA ან თანამშრომლობითი რობოტები), საყრდენი კონექტორები საერთო მიმაგრების სისტემას უზრუნველყოფს, რაც ამარტივებს ხელსაწყოების ინტეგრირებას და შესაბამისად მომსახურე ტექნიკოსების სწავლების საჭიროებას ამცირებს.
- **მოდულარული ინსტრუმენტების მხარდაჭერა**: კონექტორები საშუალებას აძლევს მრავალფუნქციანი EOAT ასამბლეების მიერთებას — პნევმატიკური გრიპერების კომბინირება სენსორებთან, კამერებთან ან ტორქის ხელსაწყოებთან ერთად — რითაც რობოტის მუხლებს აძლევს შესაძლებლობას შეასრულონ რთული ამოცანები, როგორიცაა ხარისხის შემოწმება მონტაჟის პროცესში.
- **განმეორებადობის გაუმჯობესება**: საყრდენი კონექტორების მაღალი სიზუსტის დამუშავება უზრუნველყოფს ხელსაწყოების ერთნაირ პოზიციონირებას, რაც აუცილებელია 3D პრინტინგის მსგავს აპლიკაციებში, სადაც უმნიშვნელო გადახრაც კი შეიძლება დააზიანოს ნაწილის ხარისხი.
Ელექტრონიკის წარმოებაში, ეს სინერგია ხილულია სადგურის მონტაჟში, სადაც რობოტის მუხლები EOAT-დაკავშირებული პნევმატიკური გრიპერებით ამაგრებს კომპონენტებს მიკრონული სიზუსტით, რაც მხარდაჭერილია კონექტორის სტაბილური ინტერფეისით.
## სარეალო გამოყენება: ავტომატიზებული სამუშაო პროცესების გარდაქმნა
EOAT საყრდენი კონექტორების, პნევმატიკური გრიპერებისა და რობოტის მუხლების ინტეგრირება მრეწველობაში ახდენს რევოლუციას:
- **ლოგისტიკა და გამოყენება**: ელექტრონული კომერციის შენობებში რობოტების ხელის საშუალებით EOAT-თან დაკავშირებული საშლაგე მიმაგრებელი ხელს უწყობს სხვადასხვა ზომის კონტეინერების მართვას. ჩარჩოს კავშირები უზრუნველყოფს სამუშაო ინსტრუმენტების სწრაფ შეცვლას, რაც საშუალებას იძლევა გადავიდეთ მაგიდების საჭიდებიდან ნაზი კონვერტების საჭიდებზე.
- **საკვები და სასმელი**: ჰიგიენური EOAT კავშირების გამოყენება საკვების ხარისხის პნევმატიკური საჭიდებით უზრუნველყოფს პროდუქტების ჰიგიენიურ მართვას, შესაფერისი ხილის დასალაგებლიდან დაწყებული და საჭიდების საშუალებით სატრანსპორტო ლენტებზე განთავსებით დამთავრებული, რაც აკმაყოფილებს მკაცრ უსაფრთხოების სტანდარტებს.
- **აეროკოსმოსური წარმოება**: მაღალი სიმაგრის ალუმინის ან ტიტანის EOAT კავშირები უზრუნველყოფს პნევმატიკური საჭიდების მაგიდების ხელებთან დაკავშირებას, რაც საშუალებას იძლევა ზუსტად მოვახდინოთ მსუბუქი, თუმცა სტრუქტურულად მნიშვნელოვანი კომპონენტების მართვა, როგორიცაა ფრთების პანელები.
## EOAT ჩარჩოს კავშირების ინტეგრირების უპირატესობები
EOAT ჩარჩოს კავშირების, პნევმატიკური საჭიდების და რობოტის ხელების ერთობლივი გამოყენება იძლევა გასაზომ სარგებელს:
- **გაუმჯობესებული პროდუქტიულობა**: გადასაყვანი დროის შემცირება და 24/7 ექსპლუატაციის შესაძლებლობა მაღალი მოცულობის პირობებში წარმოების ციკლებს ამცირებს 30%-მდე.
- **ხარჯთაღნობა**: მოდულური ინსტრუმენტები ამცირებს სპეციალიზებული რობოტის მუხლების საჭიროებას, ხოლო გაუმჯობესებული სიზუსტე კი მასალების დანახარჯს აკონტროლებს.
- **მუშაკის უსაფრთხოება**: ხელახლა მეორებადი ან საფრთხის შემცველი ამოცანების (მაგ., მძიმე საგნების აწევა) ავტომატიზება ამცირებს სამუშაო ადგილზე დაზიანებებს, ხოლო თანამშრომლობითი რობოტები EOAT სისტემებით უსაფრთხოდ ურთიერთქმედებენ ადამიანის ოპერატორებთან.
- **გასაშლელობა**: როგორც კი წარმოების მოთხოვნები იცვლება, მასტერსკეები შეძლებენ EOAT კომპონენტების განახლებას ან ხელახლა კონფიგურაციას რობოტული სისტემების სრულად შეცვლის გარეშე, რაც ინვესტიციების დაცვას უზრუნველყოფს.
## მომდევნო ტენდენციები: EOAT ტექნოლოგიებში ინოვაციები
Როგორც კი ავტომატიზაცია წინ იწევს, EOAT საყრდენი კავშირები იმ ახალ მოთხოვნებს უპასუხებს:
- **გონივრული კავშირები**: კავშირებში ჩაშენებული სენსორები ინსტრუმენტის გახმარებას, ტემპერატურას და დაჭერის ძალას შეამოწმებს, რაც პროგნოზირებადი შენარჩუნების და რეალურ დროში კორექტირების შესაძლებლობას იძლევა IoT ინტეგრაციით.
- **დამატებითი წარმოება**: 3D-ბეჭდვის კონექტორები, რომლებიც მორგებულია კონკრეტული გამოყენებისთვის, შესაძლოა მოგვცეს ისეთი რთული გეომეტრიის მქონე დეტალები, რომლებიც უფრო იოლი წონის მქონეა და შესაბამისად უფრო მაღალი მუშაობის მაჩვენებლის გამომწვევია.
- **გამძლეობა**: გარემოს დამცავი მასალები და ენერგოეფექტური დიზაინი უზრუნველყოფს EOAT სისტემების გლობალურ ძალისხმევასთან ერთად მანქანათმშენებლობის ნაკლები ნახშირორის სახით გამოყენების მიმართულებით.
## დასკვნა
EOAT საყრდენი კონექტორები ავტომატიზებული მასწავლებლების უხილავი გმირებია, რომლებიც უზრუნველყოფენ პნევმატიკური მუშტების და რობოტის მუშტების უსწრაფეს ინტეგრაციას. თავსებადობის, მოქნილობის და სიზუსტის ხელშეწყობით ისინი აძლევენ მანქანათმშენებლებს შესაძლებლობას გაერკვნენ ცვლილებებში, გაზარდონ სამუშაო სიმძლავრე და შეინარჩუნონ კონკურენტული უპირატესობა გლობალურ ბაზარზე. როგორც ტექნოლოგია წინ იწევს, ეს კონექტორები განაგრძობენ მნიშვნელოვანი როლის თამაშს ინდუსტრიული ავტომატიზაციის მომავალის ფორმირებაში - სადაც ეფექტურობა, მრავალფეროვნება და სიახლე ერთად იკრიბებიან.