# EOAT חיבורי מסגרת: שילוב של אוגרים פניאומטיים וזרועות רובוטיות במחסנים אוטומטיים
בעידן של התעשייה ה-4.0, workshops אוטומטיים עוברים שינוי מהפכני לקראת יעילות, דיוק וגמישות גדולים יותר. בלב המעבר הזה נמצא שילוב חלק של מערכות EOAT (כלים בקצה הזרוע), כאשר מקלעי מסגרת ממלאים תפקיד מרכזי בחיבור הזרועות הרובוטיות עם רכיבים קריטיים כמו אוגרים פניאומטיים. המאמר הזה חוקק כיצד מקלעי מסגרת של EOAT משפרים תהליכי אוטומציה, מעצימים גיוון תפעולי, ומעוררים תועלתנות בסביבות ייצור מודרניות.
## תפקודם של מקלעי מסגרת EOAT באוטומציה
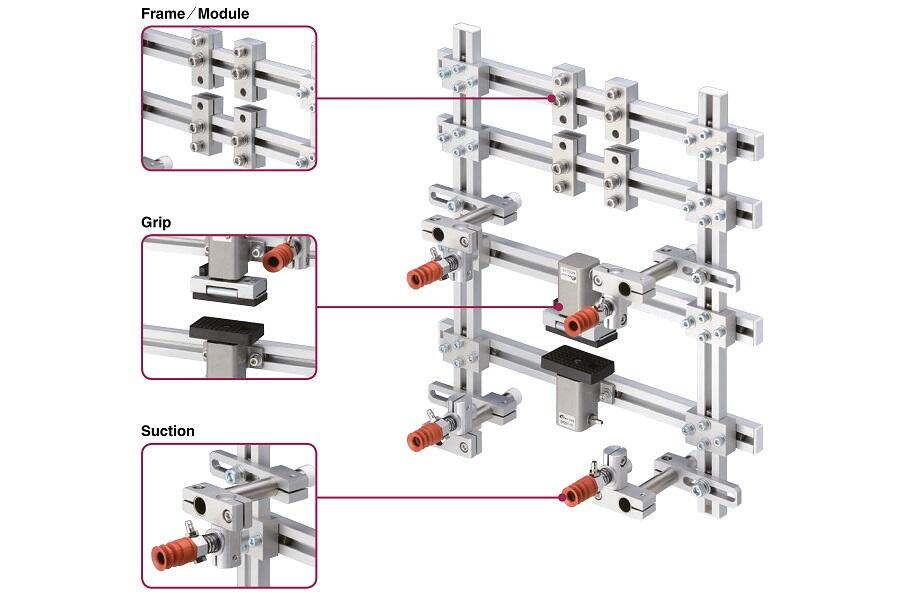
מקלעי מסגרת EOAT משמשים כממשק מכאנלי בין זרועות רובוטיות לבין אפקטורים סופיים, כגון אוגרים פניאומטיים, כפות ספוג או כלים מותאמים אישית. המקלעים פותחו כדי לאפשר חיבורים חזקים, מודולריים וניתנים להתאמה, המסוגלים לעמוד בדרישות של מחזורים ייצור מהירים תוך שמירה על דיוק בהזמנה וחוזק.

במעבדות אוטומטיות, שבהן הפעילות משתרעת מהובלת חומרים ועד להרכבות מורכבות, מקלעי מסגרת EOAT פותרים שלושה אתגרים מרכזיים:
- **תאימות**: אפשור שילוב חלק בין מודלי זרועות רובוטיות שונות לבין אפקטורים סופיים מגוונים.
- **גמישות**: אפשור החלפת כלים מהירה כדי לעמוד בדרישות ייצור משתנות.
- **עיקוב**: עמידות בפני מתח מכאנלי, רעש מכאנלי וגורמים סביבתיים כמו אבק או נוזל קירור.

## שילוב עם אוגרים פניאומטיים: דיוק בהובלת חומרים
אגרופים פניאומטיים пользות נרחבת באוטומציה בשל המהירות, שליטת הכוח והתאמה לניהול חומרים מגוונים - מחלקים עדינים ועד רכיבים מתכתיים כבדים. כאשר הם מחוברים לקונקטורי מסגרת EOAT, הביצועים שלהם מתקדמים דרך:
1. **התאמה מוגזמת**: קונקטורי המסגרת מאפשרים לאגרופים הפניאומטיים להשתנות או להחליף מקומות תוך דקות, ומאפשרים לזרועות הרובוטיות לעבור בין משימות שונות, כגון איסוף, הנחה או מיון, מבלי להפסיק את הפעילות.
2. **הפצה מיטבית של הכוח**: עיצובים קשיחים אך קלים של הקונקטורים מבטיחים העברת כוח אחידה מהאגרוף לחלק, מפחיתים את הסיכון לנזק לפריטים שבירים, תוך שמירה על אמינות האחיזה עבור עומסים כבדים.
3. **אינטגרציה פניאומטית חלקה**: רבים מקונקטורי ה-EOAT מצוידים בcsוות אויר מובנות, מה שמונע את הצורך בצינורות חיצוניים. זה מקטין את הפסולת, מפחית את הסיכון לסבך בצינורות במהלך תנועות במהירות גבוהה ומשפר את תפקוד המערכת.
בשורות ייצור אוטומotive, לדוגמה, האינטגרציה הזו מאפשרת לזרועות רובוטיות שמצוידות במנחשים פניאומטיים לשלוף גם פנלים של גוף הרכב וגם חומרים קטנים interchangeably, בהנחיית מקלעי EOAT שמבטיחים יישור מדויק בכל תחנה.
## אינטגרציה עם זרועות רובוטיות אוטומטיות: דחיקת יעילות תפעולית
זרועות רובוטיות אוטומטיות הן הסוסי קרב של מפעלים מודרניים, אך היעילות שלהן תלויה בכלים שבהם הן מחזיקות. מקלעי מסגרת EOAT משחררים את הפוטנציאל המלא שלהן על ידי:
- **סטנדרטיזציה של ממשקים**: ללא קשר למותג או דגם הזרוע הרובוטית (לדוגמה, זרועות מפרקים, SCARA או רובוטים שיתופיים), מקלעי מסגרת מספקים מערכת התקנה אוניברסלית, מה שפישט את שילוב הכלים ומצמצם את זמן האימון של הטכנאים.
- **תמיכת כלים מודולריים**: חיבורים מאפשרים חיבור של אספה רב-תכליתית של EOAT - שילוב של אוגרים פניאומטיים עם חיישנים, מצלמות או כלים טורקיים - לאפשרת אופטימלית של זרועות רובוטיות לביצוע משימות מורכבות כמו בדיקות איכות במהלך האספה.
- **שיפור החזרה על ביצועים**: עיבוד מדויק של חיבורי שלדה מבטיח מיקום עקבי של הכלים, מה שקריטי ליישומים כמו הדפסה תלת-ממדית, שבהן אפילו סטיות קטנות במיקום עלולות לפגוע באיכות החלק.
בתעשייה האלקטרונית, סינרגיה זו בולטת בהרכבת של לוחות המעגלים, כאשר זרועות רובוטיות מצוידות באוגרים פניאומטיים המחוברים דרך EOAT ממקדות רכיבים בדיוק של רמות מיקרון, תוך תמיכה בממשק יציב של החיבור.
## יישומים בעולמות מציאות: המרת תהליכי עבודה אוטומטיים
שילובם של מקלעי מסגרת EOAT, אוגרים פניאומטיים וזרועות רובוטיות מחדד את התעשייה:
- **ลอจิสติกส์และการบรรจุภัณฑ์**: ในศูนย์ปฏิบัתิการอีคอมเมิร์ซ แขนหุ่นยนต์ใช้ตัวจับแบบสุญญากาศที่เชื่อมต่อกับ EOAT เพื่อจัดการกับพัสดุที่มีขนาดแตกต่างกัน ตัวเชื่อมต่อเฟรมช่วยให้สามารถเปลี่ยนเครื่องมือได้อย่างรวดเร็ว ทำให้สามารถสลับระหว่างตัวจับสำหรับกล่องกระดาษลูกฟูกและซองจดหมายที่เปราะบาง
- **อาหารและเครื่องดื่ม**: ตัวเชื่อมต่อ EOAT ที่สามารถทำความสะอาดได้ จับคู่กับตัวจับลมที่ปลอดภัยสำหรับอาหาร ช่วยอำนวยความสะดวกในการจัดการผลิตภัณฑ์อย่างถูกสุขลักษณะ ตั้งแต่การคัดแยกผลไม้ไปจนถึงการวางสินค้าบรรจุภัณฑ์บนสายพานลำเลียง ตามมาตรฐานความปลอดภัยที่เข้มงวด
- **การผลิตอากาศยาน**: ตัวเชื่อมต่อ EOAT ที่ทำจากอลูมิเนียมหรือไทเทเนียมที่มีความแข็งแรงสูง เชื่อมต่อตัวจับลมกับแขนหุ่นยนต์ ช่วยให้สามารถควบคุมชิ้นส่วนที่มีน้ำหนักเบาแต่มีความสำคัญทางโครงสร้าง เช่น แผงปีกเครื่องบิน ได้อย่างแม่นยำ
## ข้อดีของการผนวกรวมตัวเชื่อมต่อเฟรม EOAT
การใช้งานตัวเชื่อมต่อเฟรม EOAT ตัวจับลม และแขนหุ่นยนต์ร่วมกันนำมาซึ่งประโยชน์ที่วัดได้:
- **עלייה בפועולתיות**: הפחתת זמני המעבר ויכולת הפעלה 24/7 מורידים את מחזורי הייצור ב-30% בסביבות נפח גבוה.
- **חיסכון בتكסיסים**: ייצור מודולרי מפחית את הדרישה לזרועות רובוטיות מותאמות, בעוד דיוק מוגזם מפחית פסולת חומרים.
- **ביטחון עובדים**: אוטומציה של משימות חוזרות או מסוכנות (למשל, נשיאת עצמים כבדים) מפחיתת את מספר פגיעות במקום העבודה, עם רובוטים שיתופיים מצוידים במערכות EOAT המשמשים בבטחה לצד עובדים אנושיים.
- **הרחבה**: ככל שהתפתחויות הייצור משתנות, workshops יכולות לשדרג או להרכיב מחדש רכיבי EOAT מבלי להחליף את מערכות הרובוטים המלאות, וכך להגן על ההשקעות לעתיד.
## מגמות עתידיות: חדשנות בטכנולוגיית EOAT
בהתאם להתפתחויות באוטומציה, מתקדמים חיבורי השרשראות EOAT כדי לעמוד בדרישות חדשות:
- **מחברים חכמים**: חיישנים משובצים במחברים יישקפו את רמת הבلى, הטמפרטורה ועוצמת האחיזה, ויאפשרו תחזוקה מקדימה והגדרות בזמן אמת באמצעות שילוב בIoT.
- **ייצור תוספי**: קונקטורים מודפסים ב-3D, המותאמים ליישומים ספציפיים, יספקו משקל קל יותר וגאומטריה מורכבת, ומשפרים את הביצועים.
- **קיימות**: חומרים ידידותיים לסביבה ועיצובים חוסכי אנרגיה יתאימו את מערכות EOAT למשימות העולות בהפחתת האפקט של הייצור על הסביבה.
## תוצאה
קונקטורים למסגרת EOAT הם הגיבורים הבלתי נראים של מפעלים אוטומטיים, ומאפשרים אינטגרציה חלקה של אוגרים פניאומטיים וזרועות רובוטיות. הם תומכים בתקינות, גמישות ודיוק, ומאפשרים לייצרנים להתאים את עצמם לצרכים משתנים, להגביר את התפוקה ולשמור על יתרון תחרותי בשוק העולמי. עם התקדמות הטכנולוגיה, הקונקטורים הללו ימשיכו למלא תפקיד מרכזי בצורת עתיד האוטומציה התעשייתית - שם יעילות, רב-תכליתיות וחדשנות נפגשות.