# EOAT Frame Connectors: Integriranje pneumatskih stezaljki i robotskih ruku u automatiziranim radionicama
U doba Industrije 4.0., automatizirane radionice prolaze kroz transformacijski pomak prema većoj učinkovitosti, preciznosti i fleksibilnosti. U srcu ove evolucije nalazi se bezprobleman integriranje sustava završne obrade (EOAT), gdje konektori okvira igraju ključnu ulogu u povezivanju robotskih ruku s kritičnim komponentama poput pneumatskih stezaljki. U ovom članku istražujemo kako EOAT konektori okvira optimiziraju procese automatizacije, povećavaju operativnu svestranost i pokreću produktivnost u modernim proizvodnim okolinama.
## Uloga poveznica okvira EOAT u automatizaciji
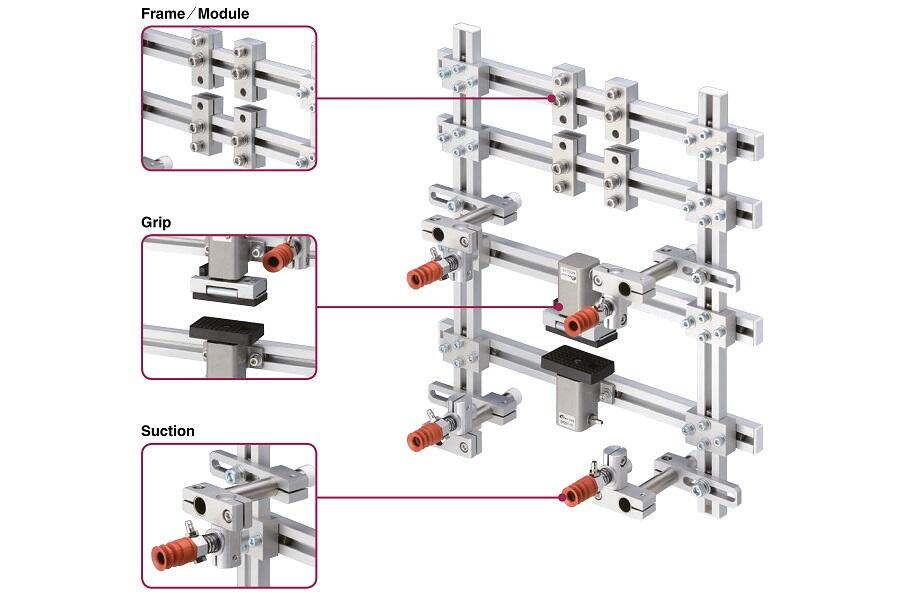
Poveznice okvira EOAT služe kao mehaničko sučelje između robotskih ruku i end-effectora, poput pneumatskih stezaljki, vakuumskih čaša ili prilagođenih alata. Ove poveznice dizajnirane su da pruže izdržljive, modularne i prilagodljive veze koje izdržavaju stres visokih radnih učestalosti, osiguravajući preciznu poravnavanje i ponovljivost.

U automatiziranim radionicama, gdje se zadaci kreću od manipulacije materijalom do složenih sastavljanja, poveznice okvira EOAT rješavaju tri ključna izazova:
- **Kompatibilnost**: Omogućavanje besprijekorne integracije između različitih modela robotskih ruku i end-effectora.
- **Fleksibilnost**: Omogućavanje brzih promjena alata za prilagodbu različitim zahtjevima proizvodnje.
- **Izdržljivost**: Izdržavanje mehaničkog naprezanja, vibracija i okolinskih čimbenika poput prašine ili rashladnih tekućina.

## Sinergija s pneumatskim stezaljkama: preciznost u manipulaciji materijalom
Pneumatski stezni elementi u automatizaciji su izuzetno popularni zbog svoje brzine, kontrole sile i pogodnosti za rukovanje različitim materijalima – od delikatne elektronike do teških metalnih komponenti. Kada se kombiniraju s poveznicama okvirnih EOAT elemenata, njihova performansa se poboljšava na sljedeće načine:
1. **Povećana prilagodljivost**: Poveznice okvira omogućuju da se pneumatski stezni elementi za nekoliko minuta prepozicioniraju ili zamijene, što robotiziranim rukama omogućuje prelazak s jednog zadatka na drugi, poput hvatanja, postavljanja ili sortiranja, bez prekida rada.
2. **Optimizirana distribucija sile**: Čvrsti, ali lagani dizajni poveznica osiguravaju jednoliku transmisiju sile s steznog elementa na radni komad, smanjujući rizik od oštećenja krhkih predmeta, a istovremeno održavajući pouzdanu silu stezanja za teške terete.
3. **Bezproblema pneumska integracija**: Mnoge EOAT poveznice uključuju ugrađene zračne kanale, čime se uklanja potreba za vanjskim cijevima. To pojednostavljuje dizajn, smanjuje zbrku i minimizira rizik od zapetljavanja cijevi tijekom brzih pokreta.
Na primjer, na automobilskim linijama za montažu, ova integracija omogućuje robotskim rukama opremljenim pneumatskim stezaljkama da naizmjenično rukuju karoserijskim pločama i sitnim pričvrsnim elementima, uz vođenje EOAT konektora koji osiguravaju točno poravnanje na svakoj stanici.
## Integracija s automatiziranim robotskim rukama: Povećanje operativne učinkovitosti
Automatizirane robotske ruke su glavne snage savremenih radionica, ali njihova učinkovitost ovisi o alatom kojim raspolažu. EOAT okvirni konektori otključavaju njihov potencijal na sljedeće načine:
- **Standardizacija sučelja**: Bez obzira na proizvođača ili model robotske ruke (npr. artikulirane, SCARA ili kolaborativne robote), okvirni konektori pružaju univerzalni sustav za montažu, pojednostavljujući integraciju alata i smanjujući potrebe za obukom tehničara.
- **Podrška modularnim alatom**: Spojnici omogućuju pričvršćivanje višefunkcionalnih EOAT sklopova – kombinirajući pneumatske stezaljke s senzorima, kamerama ili alatom za moment – što omogućuje robotskim rukama izvođenje kompleksnih zadataka poput inspekcije kvalitete tijekom sklopavanja.
- **Poboljšanje ponovljivosti**: Visokotančna obrada spojnica na okviru osigurava dosljedno pozicioniranje alata, što je kritično za primjene poput 3D ispisivanja, gdje i najmanje odstupanje može ugroziti kvalitetu komponente.
U proizvodnji elektronike, ova sinergija se ogleda u sklopavanju ploča s tiskanim krugovima, gdje robotske ruke opremljene pneumatskim stezaljkama spojenim na EOAT točno postavljaju komponente s točnošću na razini mikrona, uz stabilno sučelje koje osiguravaju spojnici.
## Primjena u stvarnom svijetu: Transformiranje automatiziranih procesa
Integracija spojnica za okvir EOAT-a, pneumatskih stezaljki i robotskih ruku transformira industriju:
- **Logistika i pakiranje**: U centrima isporuke e-trgovine, robotske ruke koriste vakuum ventile priključene na EOAT za rukovanje paketima različitih veličina. Spojnice za okvir omogućuju brzu zamjenu alata, što omogućuje prelazak između hvataljki za kartonske kutije i delikatnih koverti.
- **Hrana i piće**: Dezinficirajuće EOAT spojnice u kombinaciji s pneumatskim hvataljkama za hranu omogućuju higijensko rukovanje proizvodima, od sortiranja voća do postavljanja pakiranih artikala na transportne trake, uz pridržavanje strogo utvrđenih sigurnosnih standarda.
- **Proizvodnja zrakoplova**: Spojevi od čelika visoke čvrstoće ili titana za EOAT pričvršćuju pneumatske hvataljke za robotske ruke, omogućujući preciznu manipulaciju s laganim, ali strukturno kritičnim komponentama poput panela krila.
## Prednosti integracije spojnica za okvir EOAT-a
Kombinirana upotreba spojnica za okvir EOAT-a, pneumatskih hvataljki i robotskih ruku omogućuje mjerljive pogodnosti:
- **Povećana produktivnost**: Smanjeno vrijeme za preradnju i mogućnost rada 24/7 smanjuju cikluse proizvodnje do 30% u uvjetima visokih volumena.
- **Ušteda u troškovima**: Modularne alatke smanjuju potrebu za specijaliziranim robotskim rukama, dok poboljšana preciznost minimizira otpad materijala.
- **Sigurnost radnika**: Automatizacija ponavljajućih ili opasnih zadataka (npr. podizanje teških predmeta) smanjuje radne ozljede, dok suradnički roboti opremljeni EOAT sustavima sigurno rade uz ljudske operatore.
- **Mogućnost skaliranja**: Kako se zahtjevi proizvodnje razvijaju, radionice mogu nadograditi ili rekonfigurirati EOAT komponente bez zamjene cijelih robotskih sustava, osiguravajući dugoročnu isplativost investicija.
## Budući trendovi: Inovacije u EOAT tehnologiji
Kako se automatizacija razvija, poveznički elementi EOAT sustava prilagođavaju se novim zahtjevima:
- **Pametni poveznički elementi**: Ugrađeni senzori u poveznicima pratit će trošenje alata, temperaturu i silu zahvata, omogućujući prediktivnu održavanje i prilagodbe u stvarnom vremenu putem integracije IoT-a.
- **Dodatna proizvodnja**: 3D ispisani konektori, prilagođeni specifičnim primjenama, omogućit će manju težinu i kompleksne geometrije, što će dodatno optimizirati učinak.
- **Održivost**: Ekološki prihvatljivi materijali i energetski učinkoviti dizajni uskladit će sustave za vanjsko učvršćivanje alata s globalnim naporima za smanjenje ugljičnog otiska proizvodnje.
## Zaključak
Konektori za okvir vanjskog učvršćivanja alata su nepriznati heroji automatiziranih radionica, koji omogućuju bezproblemanu integraciju pneumatskih stezaljki i robotskih ruku. Potičući kompatibilnost, fleksibilnost i preciznost, oni omogućuju proizvođačima da se prilagode promjenama na tržištu, povećaju produktivnost i održe konkurentsku prednost na globalnom tržištu. Dok tehnologija napreduje, ovi konektori i dalje će imati ključnu ulogu u oblikovanju budućnosti industrijske automatizacije – gdje se susreću učinkovitost, svestranost i inovacije.