
*Cách các công cụ chuyên dụng có thể thu hẹp khoảng cách giữa robot và các tác vụ thực tế*
---
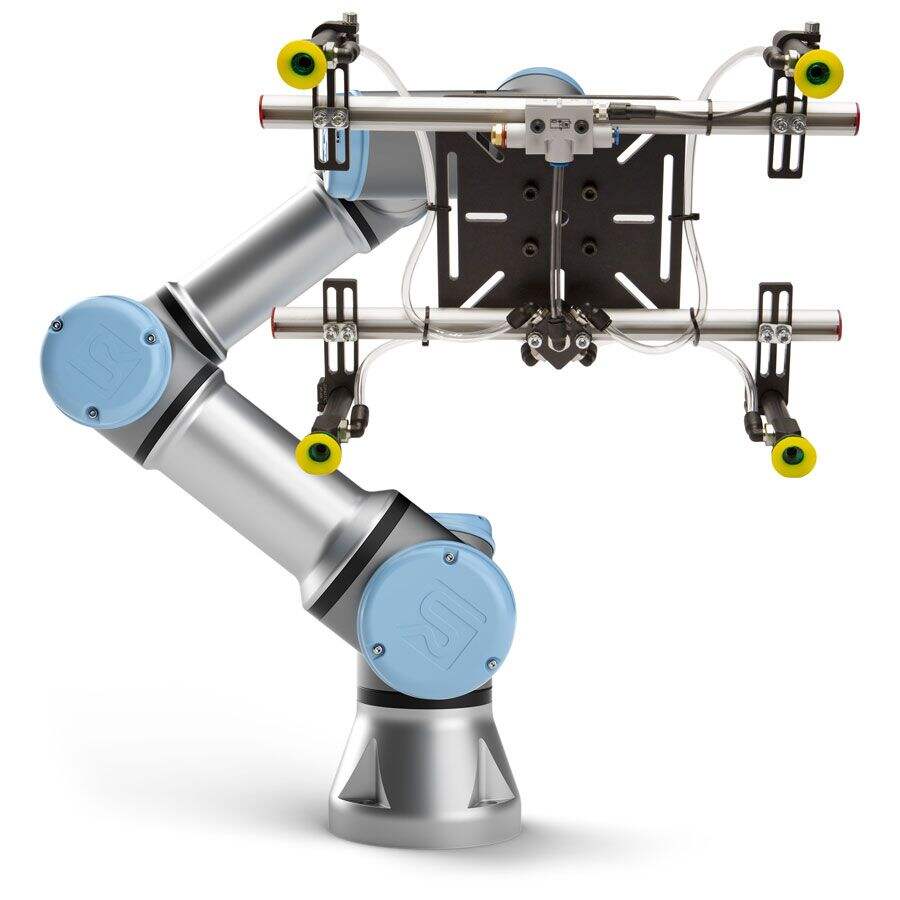
### ? **Cơ cấu chấp hành cuối là gì?**
Các cơ cấu chấp hành cuối (EOATs) chuyển đổi tiềm năng của robot thành hành động vật lý. Được gắn trên khớp cuối cùng của cánh tay robot, những thiết bị này **tương tác trực tiếp với đối tượng gia công**—gắp chính xác, thay đổi hoặc cảm nhận các đối tượng. Hãy hình dung chúng như là:
- **Đôi bàn tay chuyên biệt**, thực hiện các nhiệm vụ từ phẫu thuật vi mô đến hàn nặng
- **Phần mở rộng cảm biến**, thu thập dữ liệu về lực/nhiệt độ/hình ảnh
- **Giao diện thích ứng**, chuyển đổi chuyển động của robot thành tác động ngoài thực tế
> *Nhận định quan trọng*: Một robot công nghiệp không có EOAT phù hợp cũng giống như một chiếc điện thoại thông minh không có ứng dụng—phần cứng mạnh mẽ đang chờ được sử dụng.
---
### ?️ **Bốn danh mục chức năng**
? **1. Hệ thống bám và điều khiển**
*Đảm bảo thao tác an toàn với các vật thể*
- **Gripper**: Thiết kế hai ngón/ba ngón linh hoạt (tuân thủ ISO 9409-1) cho tải trọng từ 0,1 g đến 2.000 kg
- **Giải pháp chân không**: Mút hút kiểu hiệu ứng Bernoulli cho bề mặt kính dễ vỡ hoặc xốp
- **Thiết bị nâng từ tính**: Phiên bản điện từ cho phép thả tấm thép tức thì
- **Robot mềm**: Bộ gắp silicone tích hợp cảm biến áp suất dùng cho sản phẩm không đều
⚡ **2. Công cụ gia công**
*Chuyển đổi trực tiếp nguyên liệu*
- **Đầu hàn chính xác**: Đầu hàn lai laser với độ chính xác mối hàn lên đến 0,05 mm
- **Bơm vi mô**: Thiết bị phun keo áp điện cho giọt keo 3 pL
- **Máy mài không phát tia lửa điện**: Thiết bị xử lý bề mặt cho khu vực nguy hiểm
- **Máy phun phủ plasma**: Hệ thống lớp phủ đạt tiêu chuẩn hàng không vũ trụ
? **3. Đơn vị kiểm tra và đo lường**
*Các giác quan của robot*
- **Máy chụp ảnh siêu phổ**: Phát hiện các khuyết tật vật liệu dưới mức milimet
- **Mảng cảm biến xúc giác**: Bàn đệm xác minh độ nguyên vẹn bao bì
- **Máy quét LiDAR**: Cho phép robot chọn hộp trong môi trường lộn xộn
- **Máy phân tích nhiệt**: Lập bản đồ phân bố nhiệt trong quá trình đúc
?️ **4. Các mô-đun chuyên dụng**
*Thiết kế dành cho môi trường khắc nghiệt*
- **Cơ cấu điều khiển cryogenic**: Dụng cụ tương thích với nitơ lỏng -196°C
- **Bàn kẹp đã được chứng nhận ATEX**: Thiết kế chống nổ cho nhà máy hóa chất
- **Dụng cụ phẫu thuật vô trùng**: Cơ cấu sinh thiết phù hợp với tiêu chuẩn ISO 13485
- **Tay đòn mô-men dưới biển**: Thiết bị bảo trì đường ống dưới đáy biển sâu
---
⚙️ **Những điểm thiết kế hiệu suất tối ưu**
1. **Tối ưu hóa tải trọng**
Cấu trúc sợi carbon giảm trọng lượng đi 60% trong khi vẫn duy trì độ cứng, dẫn đến thời gian chu kỳ nhanh hơn. Khi thay đổi công cụ, luôn tính toán sự dịch chuyển của trọng tâm.
2. **Khả năng thay đổi nhanh linh hoạt**
Giao diện ISO 16086-1 cho phép thay đổi công cụ trong chưa đầy 0,5 giây. Các hệ thống hiện đại sử dụng thẻ RFID để định cấu hình tự động.
3. **Tích hợp phản hồi thông minh**
Các rosette đo biến dạng tích hợp cho phép điều khiển lực kẹp thích ứng, và cảm biến rung dự đoán sự cố vòng bi hơn 200 giờ trước khi dừng máy.
4. **Khả năng thích ứng với môi trường**
Vỏ bọc đạt tiêu chuẩn IP69K chịu được việc xịt rửa áp suất cao, và lớp phủ gốm giữ độ chính xác ở nhiệt độ lò nướng lên đến 800°C.
---
### ? **Những Câu Chuyện Chuyển Đổi Ngành Công Nghiệp**
- **Ô tô**: Súng hàn robot giảm 30% thời gian sản xuất Tesla Model Y
- **Điện tử**: Bộ gắp chống tĩnh điện giúp Samsung đạt tỷ lệ lỗi lắp ráp chip là 99,98%
- **Dược phẩm**: Thiết bị xử lý lọ vô trùng loại bỏ nguy cơ nhiễm bẩn trong quá trình chiết rót vaccine COVID-19
- **Nông nghiệp**: Bộ gắp mềm tích hợp công nghệ thị giác máy tính có thể thu hoạch 20.000 quả dâu tây mỗi giờ
---
### ? **Lĩnh Vực Tiếp Theo: EOAT Nhận Thức**
*Phần cứng gặp gỡ trí tuệ nhân tạo*
- **Công cụ tự cấu hình lại**
Các ngón tay làm từ hợp kim nhớ hình dạng tự động thích nghi với các vật thể chưa biết
- **Thuật toán cầm nắm dự đoán**
Học máy dự đoán các điểm tiếp xúc tối ưu cho đồ cổ dễ vỡ
- **Mạng phản hồi xúc giác**
Các bác sĩ phẫu thuật có thể "cảm nhận" lực cản của mô thông qua robot phẫu thuật từ xa
- **Bề mặt tự sửa chữa**
Lớp phủ vi nang tự sửa chữa các vết trầy xước nhỏ trong quá trình phẫu thuật
---
> **Điểm chính**: Các công cụ gắn ngoài hiện đại (EOAT) vượt xa các công cụ cơ học – chúng là các hệ thống **có khả năng cảm nhận, tạo ra dữ liệu** xác định tỷ suất lợi nhuận (ROI) của robot. Khi các robot cộng tác phát triển, chúng tôi kỳ vọng các bộ phận thực hiện (effectors) tích hợp sẵn sẽ kết nối qua đám mây để phân tích hiệu suất.
✍️ **Thách thức kỹ thuật**: Những hạn chế nào của EOAT đang cản trở bạn trong việc tự động hóa? Hãy chia sẻ những điểm nghẽn bên dưới và chúng tôi sẽ cung cấp cho bạn một giải pháp phù hợp!
---
### ✨ **Tại sao điều này phù hợp với độc giả toàn cầu**
- **Định hướng trực quan**: Các biểu tượng định hướng người đọc qua nội dung kỹ thuật
- **Độ sâu kỹ thuật**: Các thông số kỹ thuật mới (tiêu chuẩn ISO, dải nhiệt độ)
- **Tập trung vào giải quyết vấn đề**: Giải pháp có thể áp dụng ngay
- **Tối ưu hóa SEO**: Nhóm từ khóa (Adaptive Grabber, ISO 16086,