
*เครื่องมือเฉพาะทางสามารถเชื่อมช่องว่างระหว่างหุ่นยนต์กับงานในโลกแห่งความเป็นจริงได้อย่างไร*
---
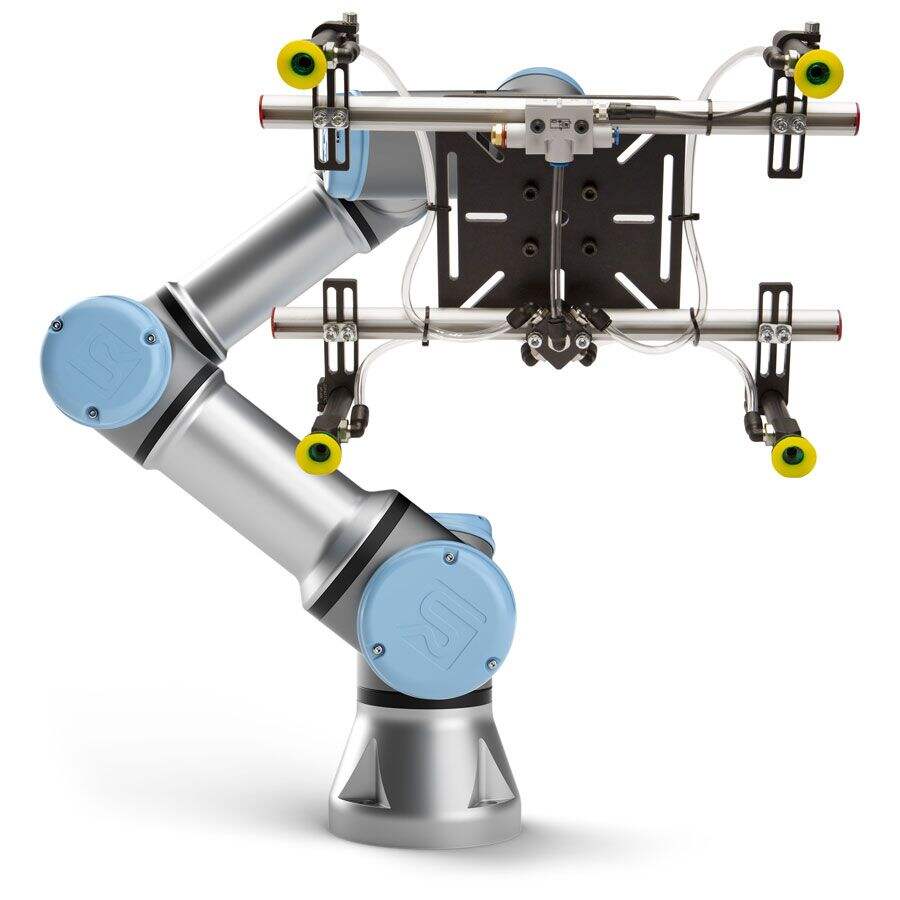
### ? **อุปกรณ์ปลายแขนหุ่นยนต์คืออะไร**
อุปกรณ์ปลายแขนหุ่นยนต์ (EOATs) ทำหน้าที่แปลงศักยภาพของหุ่นยนต์ให้กลายเป็นการกระทำทางกายภาพ โดยติดตั้งอยู่ที่ข้อต่อปลายของแขนหุ่นยนต์ อุปกรณ์เหล่านี้จะ **ปฏิสัมพันธ์โดยตรงกับชิ้นงาน** — การหยิบจับ ปรับแต่ง หรือตรวจจับวัตถุอย่างแม่นยำ เราอาจมองว่าอุปกรณ์เหล่านี้คือ:
- **มือเฉพาะงาน** ที่ทำงานตั้งแต่การผ่าตัดขนาดเล็กไปจนถึงการเชื่อมโลหะหนัก
- **ตัวขยายประสาทสัมผัส** ที่รวบรวมข้อมูลด้านแรง/อุณหภูมิ/ภาพ
- **อินเตอร์เฟซแบบปรับตัว** ที่แปลงการเคลื่อนไหวของหุ่นยนต์ให้กลายเป็นผลกระทบในโลกแห่งความเป็นจริง
> *ข้อมูลสำคัญ*: หุ่นยนต์อุตสาหกรรมที่ไม่มี EOAT ที่เหมาะสมก็เหมือนสมาร์ทโฟนที่ไม่มีแอปพลิเคชัน—ฮาร์ดแวร์ที่ทรงพลังกำลังรอการใช้งาน
---
### ?️ **สี่ประเภทการทำงาน**
? **1. ระบบการจับยึดและการควบคุม**
*เพื่อการจัดการวัตถุอย่างปลอดภัย*
- **Gripper**: ออกแบบแบบสองนิ้ว/สามนิ้วที่ใช้งานได้หลากหลาย (เป็นไปตามมาตรฐาน ISO 9409-1) รองรับน้ำหนักตั้งแต่ 0.1 กรัม ถึง 2,000 กิโลกรัม
- **Vacuum solutions**: ชุดดูดแบบใช้หลักการเบอร์นูลลี เหมาะสำหรับพื้นผิวแก้วที่เปราะบางหรือพื้นผิวที่มีรูพรุน
- **Magnetic lifters**: แบบแม่เหล็กไฟฟ้า สำหรับปล่อยแผ่นเหล็กได้ทันที
- **Soft robots**: หุ่นยนต์แบบยืดหยุ่นที่มีอุปกรณ์จับแบบซิลิโคน พร้อมเซ็นเซอร์วัดแรงดันในตัว เหมาะสำหรับผลิตภัณฑ์ที่มีรูปร่างไม่สม่ำเสมอ
⚡ **2. เครื่องมือสำหรับแปรรูป**
*การแปรรูปวัสดุโดยตรง*
- **Precision welding heads**: หัวเชื่อมเลเซอร์แบบไฮบริด ให้ความแม่นยำของรอยเชื่อมสูงสุดถึง 0.05 มิลลิเมตร
- **Micro dispensing**: อุปกรณ์ฉีดกาวแบบพีซโซอิเล็กทริกสำหรับการหยดกาวขนาด 3 พิโคลิตร
- **เครื่องลบคมแบบไม่เกิดประกายไฟ**: อุปกรณ์สำหรับการเตรียมผิวสำหรับพื้นที่อันตราย
- **เครื่องพ่นพลาสมา**: ระบบเคลือบเกรดอากาศยาน
? **3. หน่วยตรวจสอบและวัดค่า**
*อวัยวะรับสัมผัสของหุ่นยนต์*
- **กล้องหลายช่วงคลื่นความถี่สูง**: ตรวจจับข้อบกพร่องของวัสดุระดับไมครอน
- **อาร์เรย์เซ็นเซอร์ตรวจสัมผัส**: ใช้แผ่นรองเพื่อยืนยันความสมบูรณ์ของบรรจุภัณฑ์
- **เครื่องสแกน LiDAR**: ทำให้หยิบกล่องในสภาพแวดล้อมที่รกได้
- **เครื่องวิเคราะห์ความร้อน**: แสดงแผนที่การกระจายความร้อนระหว่างกระบวนการหล่อ
?️ **4. โมดูลภารกิจเฉพาะทาง**
*ออกแบบมาเพื่อทำงานในสภาพแวดล้อมสุดโต่ง*
- **เครื่องจับควบคุมอุณหภูมิต่ำ**: เครื่องมือที่ใช้งานร่วมกับไนโตรเจนเหลว -196°C
- **แคลมป์รับรองมาตรฐาน ATEX**: ดีไซน์ป้องกันการระเบิดสำหรับโรงงานเคมีภัณฑ์
- **เครื่องมือผ่าตัดปลอดเชื้อ**: แขนกลสำหรับชิ้นเนื้อที่เป็นไปตามมาตรฐาน ISO 13485
- **แขนบิดใต้ทะเลลึก**: อุปกรณ์บำรุงรักษาท่อส่งใต้ทะเล
---
⚙️ **จุดเด่นในการออกแบบประสิทธิภาพสูงสุด**
1. **การปรับปรุงกำลังบรรทุก**
โครงสร้างไฟเบอร์คาร์บอนลดน้ำหนักลง 60% แต่ยังคงความแข็งแรงไว้ได้ ส่งผลให้วงจรการทำงานเร็วยิ่งขึ้น เมื่อเปลี่ยนเครื่องมือ อย่าลืมคำนวณการเปลี่ยนแปลงของจุดศูนย์ถ่วง
2. **ความยืดหยุ่นในการเปลี่ยนเครื่องมืออย่างรวดเร็ว**
อินเตอร์เฟซ ISO 16086-1 ทำให้เปลี่ยนเครื่องมือได้ภายในเวลาไม่ถึง 0.5 วินาที ระบบสมัยใหม่ใช้แท็ก RFID เพื่อการตั้งค่าโดยอัตโนมัติ
3. **การเชื่อมต่อระบบตอบกลับอัจฉริยะ**
เซนเซอร์วัดแรงแบบฝังช่วยให้ควบคุมแรงยึดจับแบบปรับตัวได้ และเซนเซอร์วัดการสั่นสะเทือนสามารถทำนายการเกิดข้อผิดพลาดของแบริ่งได้ล่วงหน้ากว่า 200 ชั่วโมงก่อนเกิดการหยุดทำงาน
4. **การปรับตัวเข้ากับสภาพแวดล้อม**
ตัวเครื่องที่ได้รับการจัดอันดับ IP69K ทนทานต่อการทำความสะอาดด้วยแรงดันสูง และการเคลือบเซรามิกช่วยรักษาความแม่นยำในอุณหภูมิเตาอบที่ 800°C
---
### ? **เรื่องราวการเปลี่ยนแปลงอุตสาหกรรม**
- **ยานยนต์**: ปืนเชื่อมแบบหุ่นยนต์ช่วยลดเวลาการผลิต Tesla Model Y ลงได้ 30%
- **อิเล็กทรอนิกส์**: แคลมป์แบบป้องกันไฟฟ้าสถิตย์ช่วยให้ Samsung สามารถลดอัตราข้อบกพร่องในการประกอบชิปได้ถึง 99.98%
- **เภสัชกรรม**: ตัวจับหลอดแบบปลอดเชื้อช่วยกำจัดการปนเปื้อนระหว่างการบรรจุวัคซีนป้องกันโรคโควิด-19
- **การเกษตร**: แคลมป์แบบนุ่มที่ติดตั้งระบบมองเห็นด้วยคอมพิวเตอร์สามารถเก็บเกี่ยวสตรอว์เบอร์รีได้ 20,000 ผลต่อชั่วโมง
---
### ? **แนวหน้าใหม่: อุปกรณ์ปลายแขนแบบอัจฉริยะ (Cognitive EOAT)**
*ฮาร์ดแวร์พบกับปัญญาประดิษฐ์*
- **เครื่องมือปรับรูปแบบได้ด้วยตนเอง**
นิ้วจับที่ทำจากโลหะผสมที่มีความจำรูปทรงสามารถปรับตัวเข้ากับวัตถุที่ไม่ทราบลักษณะได้อัตโนมัติ
- **อัลกอริธึมการคาดการณ์การหยิบจับ**
ระบบการเรียนรู้ของเครื่องคาดการณ์จุดสัมผัสที่เหมาะสมที่สุดสำหรับวัตถุโบราณเปราะบาง
- **เครือข่ายการตอบสนองทางการสัมผัส (Haptic feedback)**
แพทย์ผ่าตัดสามารถ “รู้สึก” แรงต้านของเนื้อเยื่อผ่านหุ่นยนต์ผ่าตัดจากระยะไกล
- **พื้นผิวที่ซ่อมแซมตัวเองได้**
ชั้นเคลือบที่เป็นแคปซูลขนาดเล็กรักษารอยขีดข่วนเล็กน้อยระหว่างการผ่าตัด
---
> **สรุปสำคัญ**: อุปกรณ์ปลายแขนในปัจจุบันเกินกว่าจะเป็นเพียงเครื่องมือเชิงกล – มันคือระบบที่มีความสามารถในการรับรู้และผลิตข้อมูล ซึ่งกำหนดผลตอบแทนจากการลงทุน (ROI) ของหุ่นยนต์ โดยเมื่อหุ่นยนต์ทำงานร่วมกับมนุษย์มีวิวัฒนาการมากขึ้น เราคาดว่าอุปกรณ์ปลายแขนแบบเสียบใช้งานได้ทันทีจะเชื่อมต่อกับระบบคลาวด์เพื่อวิเคราะห์ประสิทธิภาพ
✍️ **ความท้าทายทางวิศวกรรม**: ข้อจำกัดใดของ EOATs ที่ทำให้คุณไม่สามารถดำเนินการอัตโนมัติได้? แบ่งปันปัญหาที่คุณพบแล้วเราจะเสนอแนวทางแก้ไขเฉพาะทางให้!
---
### ✨ **เหตุผลที่เนื้อหานี้เหมาะสำหรับผู้อ่านทั่วโลก**
- **การนำทางด้วยภาพสัญลักษณ์**: ไอคอนช่วยนำทางผู้อ่านไปยังเนื้อหาเชิงเทคนิค
- **ความละเอียดทางเทคนิค**: ข้อมูลจำเพาะใหม่ (มาตรฐาน ISO, ช่วงอุณหภูมิ)
- **การแก้ปัญหาโดยตรง**: แนวทางที่สามารถนำไปปฏิบัติได้ทันที
- **การปรับแต่ง SEO**: การจัดกลุ่มคำหลัก (Adaptive Grabber, ISO 16086,