
*Hvordan spesialverktøy kan overkomme kløften mellom roboter og virkelige oppgaver*
---
### ? **Hva er aktuatorer?**
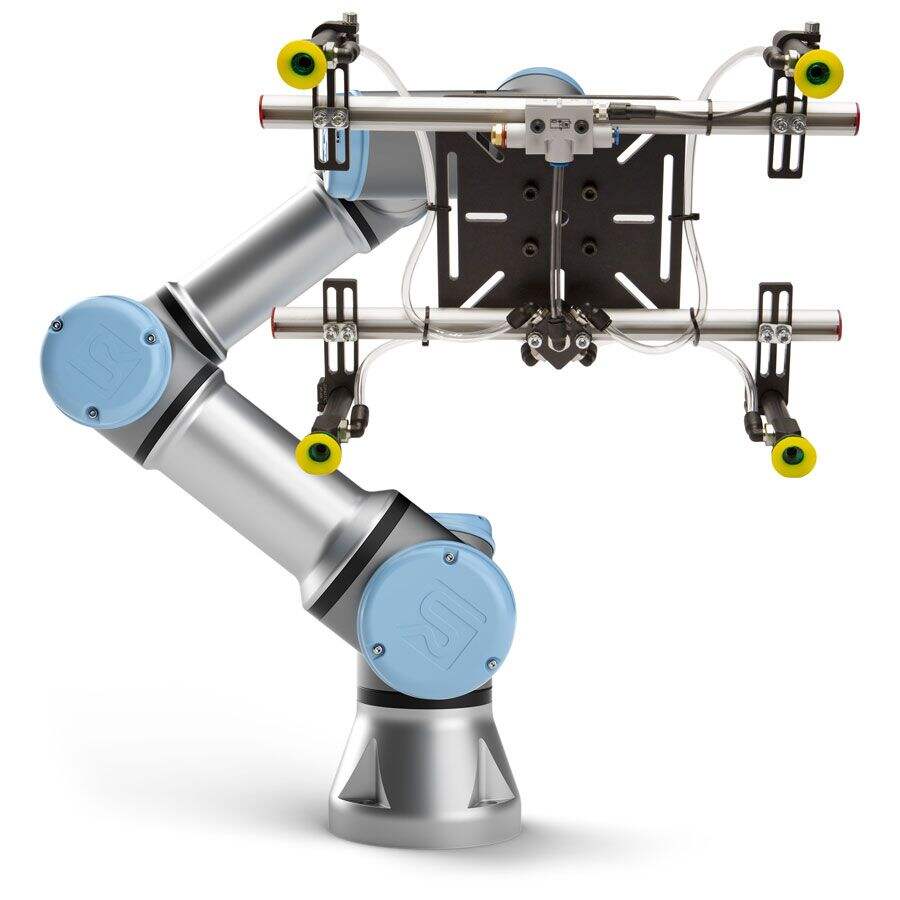
Aktuatorer (EOAT-er) oversetter en robots potensial til fysisk handling. Montert på den ytterste leddet på en robotarm, interagerer disse enhetene **direkte med arbeidsemnet** – nøyaktig å gripe, endre eller registrere objekter. Tenk på dem som:
- **Oppgavespesifikke hender**, som utfører oppgaver fra mikrokirurgi til tung sveising
- **Sanseelementer**, som samler inn data om kraft/temperatur/syn
- **Adaptive grensesnitt**, som oversetter robotbevegelse til virkelig effekt
> *Nøkkelpunkt*: En industrirobot uten riktig EOAT er som en smarttelefon uten apper – kraftig maskinvare som venter på å bli brukt.
---
### ?️ **Fire funksjonelle kategorier**
? **1. Feste- og håndteringsystemer**
*For sikker manipulering av gjenstander*
- **Gripper**: Fleksibel to-finger/tre-finger-design (i henhold til ISO 9409-1) for laster fra 0,1 g til 2 000 kg
- **Vakuum-løsninger**: Bernoulli-effekt sugemunner for skjøre glassflater eller porøse overflater
- **Magnetløftere**: Elektromagnetiske versjoner for øyeblikkelig frigjøring av stålplater
- **Bløte roboter**: Silikongrepere med innebygd trykkføler for uregelmessige produkter
⚡ **2. Prosesseringsverktøy**
*Direkte materialomforming*
- **Presisjonssveisehoder**: Laserhybrid-sveisehoder med sømmøyaktighet opp til 0,05 mm
- **Mikro-dosering**: Piezoelektriske sprøyteanordninger for limdråper på 3 pL
- **Frikjent fra gnister deburring maskiner**: Overflatebehandling utstyr for farlige områder
- **Plasma sprayer**: Flyteknisk beleggssystem
? **3. Inspeksjon og måleenhet**
*Sensoriske organer til roboten*
- **Hyperspektral kamera**: Registrerer undermillimeter materielle feil
- **Taktil sensorarray**: Monteringsskiver for å bekrefte emballasjens integritet
- **LiDAR-scanner**: Muliggjør boksplukking i rotete miljøer
- **Termisk analyser**: Kartlegger varmefordeling under støping
?️ **4. Spesialiserte misjonsmoduler**
*Designet for ekstreme miljøer*
- **Kryogen manipulator**: Verktøy som er kompatibelt med -196°C flytende nitrogen
- **ATEX-sertifisert gripeinnretning**: Eksplosjonssikker design for kjemiske fabrikker
- **Steril kirurgisk verktøy**: ISO 13485-konform biopsimanipulator
- **Undervannsdreiemomentarm**: Verktøy for vedlikehold av dyphavsrørledninger
---
⚙️ **Designpunkter for topp ytelse**
1. **Nyttelastoptimering**
Karbonfiberkonstruksjonen reduserer vekten med 60 % samtidig som stivheten opprettholdes, noe som resulterer i raskere syklustider. Ved verktøyskift skal tyngdepunktsskiftet alltid beregnes.
2. **Hurtiguttaksmobilitet**
ISO 16086-1-grensesnitt muliggjør verktøyskift på mindre enn 0,5 sekunder. Moderne systemer bruker RFID-tagger til automatisk konfigurasjon.
3. **Smart returkoblingsintegrasjon**
Innebygde strekkingsmålere muliggjør adaptiv kraftkontroll for spenning, og vibrasjonssensorer kan forutsi lagerfeil mer enn 200 timer før driftsstans.
4. **Tilpasningsevne til miljøet**
Hus med IP69K-klassifisering tåler vask med høyt trykk, og keramikkbelegg sikrer nøyaktighet ved ovntemperaturer opp til 800 °C.
---
### ? **Industritransformasjonshistorier**
- **Bilindustri**: Robottverk med sveisesekker reduserer produksjonstiden for Tesla Model Y med 30 %
- **Elektronikk**: Antistatiske gripehender gjør at Samsung oppnår en defektrate på 99,98 % i chipmontering
- **Farmasi**: Sterilt hettehåndterende utstyr eliminerer forurensning under flaskehalsproduksjon av COVID-19-vaksine
- **Jordbruk**: Myke gripehender utstyrt med dataseende kan nå plukke 20 000 jordbær per time
---
### ? **Neste horisont: Kognitiv EOAT**
*Maskinvare møter kunstig intelligens*
- **Selvrekonfigurerende verktøy**
Fingerledder av formminnlek tilpasser seg ukjente objekter automatisk
- **Forutsette grep-algoritmer**
Maskinlæring forutsier optimale berøringspunkter for skrøplige antikviteter
- **Haptisk feedback-nettverk**
Kirurger «føler» vevsmotstand med fjernstyrte kirurgiroboter
- **Selvhelbredende overflater**
Mikrokapselbelegg reparerer små skrammer under kirurgi
---
> **Nøkkelpunkt**: Moderne EOATs går utover mekaniske verktøy – de er **perceptuelle, data-genererende systemer** som bestemmer avkastningen (ROI) på robotene. Ettersom samarbeidende roboter utvikler seg, forventer vi at plug-and-play-effektorer skal være skybaserte for ytelsesanalyse.
✍️ **Ingeniørutfordring**: Hvilke begrensninger av EOATs hindrer deg fra automatisering? Del dine flaskehalsene nedenfor og vi gir deg en skreddersydd løsning!
---
### ✨ **Hvorfor dette fungerer for globale lesere**
- **Visuell navigasjon**: Ikoner viser veien for lesere gjennom teknisk innhold
- **Teknisk dybde**: Nye spesifikasjoner (ISO-standarder, temperaturområder)
- **Problemløsningsfokus**: Løsninger som kan implementeres umiddelbart
- **SEO-optimering**: Nøkkelordklynger (Adaptive Grabber, ISO 16086,